


關(guān)于安爾法
- 驚爆,傳感器直降!
- 實(shí)施預(yù)測性維護(hù)時(shí)的分析注意事項(xiàng)
- AI引領(lǐng)礦業(yè)新紀(jì)元,勘探開發(fā)迎來智慧革命
- 完美交付 | 蒙古國可汗礦業(yè)200萬噸煉焦煤重介質(zhì)選煤廠調(diào)試完畢!
- 【連載3】人工智能解惑進(jìn)階|伯克利AI課程
- 俄羅斯采礦業(yè)的全球影響力與未來展望
- 共創(chuàng)全球礦業(yè)新篇章:安爾法加入中國選冶出海聯(lián)盟!
- 【連載2】人工智能解惑進(jìn)階|伯克利AI課程
- [連載1]人工智能解惑進(jìn)階|伯克利AI課程
- 攜手千年波斯 | 中國煤機(jī)制造挺進(jìn)中亞!
- 倒計(jì)時(shí)4天!|2024俄羅斯新庫茲涅茨克國際礦業(yè)展覽會(huì)即將開幕!
- 展會(huì)預(yù)告|ALPHA與您相約2024俄羅斯新庫茲涅茨克國際礦業(yè)展覽會(huì)!
- 百團(tuán)大戰(zhàn) | XRT預(yù)拋廢(干選)的競爭現(xiàn)狀
- 冠軍球隊(duì)的秘密
- 它來了它來了!安爾法重磅推出鋰電池系列傳感器,為新能源汽車發(fā)展賦能!
- 安爾法助力井工煤礦提升設(shè)備智能運(yùn)維和生產(chǎn)安全!
- 3分錢!F35戰(zhàn)斗機(jī)同水平預(yù)測性維護(hù)和設(shè)備智能運(yùn)維云服務(wù)!
- 2022年度中國名校四川校友足球賽 | 安爾法攜手千頁科技、拜安科技贊助中國礦業(yè)大學(xué)校友隊(duì)!
- 數(shù)字感知新未來 | 安爾法“算法定義硬件”產(chǎn)品線!
- 運(yùn)維大數(shù)據(jù)的價(jià)值!安爾法智能托管運(yùn)營做深礦山服務(wù)!
- 行業(yè)喜訊 | 安爾法設(shè)備預(yù)測性維護(hù)系統(tǒng)入編《選煤廠智能化技術(shù)與裝備推薦目錄》!
- 安爾法與首都國投的結(jié)晶|年產(chǎn)60萬片工業(yè)物聯(lián)網(wǎng)硬件工廠開始試生產(chǎn)!
- 2022開年大單 | 安爾法喜獲蒙古國戈壁資源公司煤泥水系統(tǒng)智能運(yùn)維及運(yùn)營長期合同
- 分布式光纖測溫系統(tǒng)在敘永選煤廠安裝完畢,數(shù)據(jù)成功接入!
- 喜訊 | Alpha再次引領(lǐng)前沿技術(shù),微震預(yù)警入選中國工程院發(fā)布的《全球工程前沿2021》!
- 砥礪前行邁進(jìn)新征程 | 安爾法智控股改及北交所上市簽約儀式圓滿完成!
- Alpha提供礦山設(shè)備智能化硬件升級和免費(fèi)數(shù)據(jù)處理平臺
- 安爾法誠聘董事會(huì)秘書
- 智能化暴風(fēng)眼丨持續(xù)性診斷需求
- 沒有中樞神經(jīng)的工業(yè)物聯(lián)網(wǎng)就是“植物人”
- 量身定制!基于光纖分布式測溫技術(shù)的皮帶傳動(dòng)設(shè)備的PHM系統(tǒng)!
- 礦業(yè)實(shí)現(xiàn)智能化轉(zhuǎn)型的4座大山
- Alpha(安爾法)獲得成都市高新技術(shù)企業(yè)專項(xiàng)補(bǔ)貼!
- Alpha智能物聯(lián)采選系統(tǒng)分析服務(wù)
- 安爾法攜手中科芯未來落地海南瓊海!
- 沒有幾十萬行代碼,你還敢做大數(shù)據(jù)?
- 雙喜臨門!基于物聯(lián)網(wǎng)的傳感器項(xiàng)目完成簽約,落地山東濟(jì)寧與海南瓊海
- 求賢若渴!安爾法招聘:液壓、電氣及機(jī)械工程師
- 求賢若渴!安爾法招聘:液壓、電氣及機(jī)械工程師
- 今日頭條|Alpha為拉法基旗下水泥廠提供預(yù)測性維護(hù)服務(wù)!
- 喜報(bào)!你要悄悄申請“發(fā)明專利”,然后驚艷所有人!
- 近乎白給的雙11特惠!超低費(fèi)為各大選煤廠已有傳感數(shù)據(jù)接入分析診斷服務(wù)!
- 效果顯著!PdM系統(tǒng)攀煤選煤廠稀介泵油箱預(yù)警
- 地下礦山實(shí)施防碰撞系統(tǒng)的三大挑戰(zhàn)
- 無線遙控技術(shù)在鏟運(yùn)車上的應(yīng)用
- 止損280萬!PdM系統(tǒng)攀煤選煤廠又一次成功預(yù)警
- 芯片就緒-安爾法新一代智能傳感器!
- 誰是2020年硬核創(chuàng)新之最?最有潛力的28家成長企業(yè)或?qū)⒔視?/a>
- ALPHA為浩特定制礦山智能管理運(yùn)維系統(tǒng)
- ALPHA招募經(jīng)銷商或代理商
- 疫情防控|安爾法熱成像測溫筑牢疫情防控第一道防線
- 抗擊疫情,武漢加油!疫情下的安爾法預(yù)測性維護(hù)如何持續(xù)發(fā)揮奇效?
- 人才緊缺!招聘!安爾法!國際大公司!
- Alpha到訪巴西淡水河谷 | 新一輪技術(shù)培訓(xùn)指導(dǎo)
- 安爾法選煤智能化技術(shù)在德里綻放 | 印度國際選煤展
- 最快能有多快?智能預(yù)測性維護(hù)系統(tǒng)成功監(jiān)測到復(fù)選泵嚴(yán)重故障
- 準(zhǔn)備好了嗎?安爾法即將以智能化閃耀印度國際選煤大會(huì)(附智能化資料)
- 創(chuàng)舉丨全球首個(gè)5G+智能化選煤廠示范項(xiàng)目揭幕
- Alpha階段性工作匯報(bào)!(最近安爾法都在忙什么?)
- 重磅消息 | 信息系統(tǒng)集成及服務(wù)資質(zhì)認(rèn)定取消啦!
- 歡迎大家蒞臨2019北京煤炭展 | China Coal& Mining Expo
- 香港客戶來訪|遙控技術(shù)交流與深度傳感器合作
- Alpha機(jī)器學(xué)習(xí)時(shí)間進(jìn)入”億小時(shí)”階段 | 2年增長1040倍
- 巴西淡水河谷客戶來訪|實(shí)地考察與進(jìn)一步合作
- 智能遙控案例|井下采礦設(shè)備的智能遙控等級
- ALPHA受邀《馬鋼礦業(yè)資源集團(tuán)智能礦山規(guī)劃設(shè)計(jì)方案》評審會(huì)!
- 淡水河谷!安爾法在南美巴西的20000+測點(diǎn)預(yù)測性維護(hù)部署
- [免費(fèi)贈(zèng)閱]最新緬甸礦業(yè)投資指南暨少數(shù)贊助商招募
- 礦業(yè)智能化的十個(gè)超級創(chuàng)新公司
- 進(jìn)軍東南亞-安爾法預(yù)測性維護(hù)在知名半導(dǎo)體行業(yè)公司廠區(qū)設(shè)備的應(yīng)用
- 安爾法預(yù)測性維護(hù)成功進(jìn)入南美咯!巴西
- “低成本”預(yù)測性維護(hù)讓選廠智能化“觸手可及”
- 安爾法預(yù)測性維護(hù)傳感器獲本安防爆認(rèn)證
- 插播現(xiàn)場一條敘永選煤廠現(xiàn)場新聞,PdM預(yù)測到電機(jī)的一個(gè)小問題?兒童節(jié)開始的特惠預(yù)維套裝了解一下?
- 菲律賓采礦業(yè)概況
- 智能迷你堆取料機(jī)-Alpha智能裝備
- Alpha氣動(dòng)閥門在蒙古國UHG選煤廠成功應(yīng)用并完美替代歐美產(chǎn)品
- 安爾法預(yù)測性維護(hù)全新月收費(fèi)模式-開啟行業(yè)最底價(jià),還贈(zèng)送3個(gè)試用名額,要試試嗎?
- Alpha閃耀漢諾威工業(yè)展
- 人工智能項(xiàng)目的六投三不投(轉(zhuǎn))
- 預(yù)測性維護(hù)是最佳的維護(hù)方式-振動(dòng)儀監(jiān)測和在線傳感監(jiān)測的區(qū)別
- 預(yù)測性維護(hù)成效持續(xù)顯現(xiàn)-石窯店選煤廠刮板機(jī)提前排障
- 西安煤博會(huì)-安爾法受邀宣講選煤廠智能化預(yù)測性維護(hù)
- 親測有效-安爾法成功預(yù)測到敘永選煤廠設(shè)備故障并提前排障!
- 工業(yè)物聯(lián)網(wǎng)應(yīng)用場景豐富,“設(shè)備運(yùn)維”是的切入點(diǎn)
- 石窯店選煤廠預(yù)警系統(tǒng)由泰戈特監(jiān)督驗(yàn)收
- 安尓法智控在山西焦煤的選煤廠智能化演講交流
- 預(yù)測性維護(hù)在西南地區(qū)選煤廠第一個(gè)試點(diǎn)!
- 一文讀懂工業(yè)物聯(lián)網(wǎng)的礦業(yè)智能化應(yīng)用
- 無線智能故障預(yù)警系統(tǒng)在石窯店選煤廠調(diào)試成功
- 風(fēng)電領(lǐng)域設(shè)備預(yù)測性維護(hù)
- 預(yù)測性維護(hù)給礦山帶來的變革
無線遙控技術(shù)在鏟運(yùn)車上的應(yīng)用
Alpha礦業(yè)智能化 2020-08-13

1
無線遙控鏟運(yùn)車的工作狀況
在巷道生產(chǎn)過程中,由于長期的采掘及采礦工藝的特殊性,采礦條件變得越來越復(fù)雜,每個(gè)進(jìn)路崩落的礦石在鏟運(yùn)車鏟、出的過程中不斷地滑落到鏟礦區(qū),因此很多出礦進(jìn)路形成了大塊和懸拱,使得駕駛員在鏟出礦過程中,形成安全隱患。另外,采空區(qū)域內(nèi)的礦石,由于安全問題,常規(guī)做法是放棄不采,造成資源的浪費(fèi)。經(jīng)過多方面的論證,借助國家、公司智能化、綠色礦山發(fā)展規(guī)劃,以信息化、自動(dòng)化和智能化帶動(dòng)傳統(tǒng)礦業(yè)的轉(zhuǎn)型升級,打造“安全、綠色、智能、高效”礦山發(fā)展目標(biāo),遙控鏟運(yùn)車則是礦山機(jī)械化向自動(dòng)化、智能化發(fā)展的第一步。
2
鏟運(yùn)車遙控技術(shù)發(fā)展趨勢
第一階段 :視距遙控。一般操作距離為 50m~100m, 不需要布設(shè)網(wǎng)絡(luò)一次性投資成本低。優(yōu)點(diǎn) :使用安全、易于操作和維護(hù),能降低勞動(dòng)強(qiáng)度。缺點(diǎn) :很大程度上依賴于操作員的判斷力、操作技術(shù)和經(jīng)驗(yàn),不能很好的判斷鏟運(yùn)車鏟裝情況,生產(chǎn)效率低,設(shè)備運(yùn)行狀態(tài)無法實(shí)時(shí)反饋。
第二階段 :視頻遙控。在50m~100m 的范圍采用視頻傳輸方式對設(shè)備進(jìn)行操作,不需要布設(shè)網(wǎng)絡(luò)性價(jià)比高。優(yōu)點(diǎn) :通過攝像頭和監(jiān)視器畫面實(shí)現(xiàn)遠(yuǎn)距離操控,便于攜帶, 人遠(yuǎn)離危險(xiǎn)區(qū)安全有保障,顯示屏可實(shí)時(shí)反饋設(shè)備的運(yùn)行狀態(tài)。缺點(diǎn) :對井下環(huán)境要求比較高,操作人員仍是采場周圍操控設(shè)備,灰塵大、視線不良。
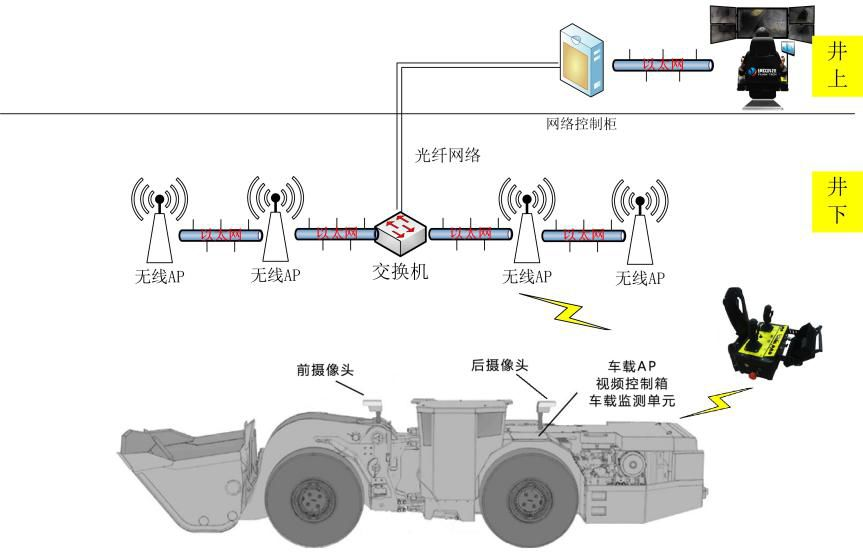
第三階段 :遠(yuǎn)程智能遙控。在井下搭建網(wǎng)絡(luò)通信系統(tǒng), 基于自主行駛技術(shù)與遠(yuǎn)程遙控技術(shù)的結(jié)合,將井下環(huán)境、設(shè)備狀態(tài)傳輸?shù)乇碇锌厥遥僮魅藛T根據(jù)監(jiān)控畫面實(shí)時(shí)進(jìn)行遠(yuǎn)程操作,徹底改變操作環(huán)境及操作方式。
3
原理及實(shí)施
無線遙控技術(shù)是對被控制對象進(jìn)行遠(yuǎn)距離控制的技術(shù)。原理是發(fā)射機(jī)把控制的電信號先編碼, 然后轉(zhuǎn)換成無線電波發(fā)送出去,接收機(jī)收到載有信息的無線電波接收,放大,解碼,得到原先的控制電信號,這個(gè)電信號再進(jìn)行功率放大用來驅(qū)動(dòng)相關(guān)的電氣元件,實(shí)現(xiàn)無線的遙控。
WIFI 是一種可以將個(gè)人電腦、手持設(shè)備(如PAD、手機(jī))等終端以無線方式互相連接的技術(shù), 通過無線電波來聯(lián)網(wǎng),是當(dāng)今使用最廣的一種無線網(wǎng)絡(luò)傳輸技術(shù)。實(shí)際上就是把有線網(wǎng)絡(luò)信號轉(zhuǎn)換成無線信號,使用無線路由器供支持其技術(shù)的相關(guān)電腦,手機(jī),平板等接收。WIFI 信號傳輸速度非常快,不需要布線,符合個(gè)人和社會(huì)信息化的需求。
我公司的遙控鏟運(yùn)車施工流程如下 :
① 第一階段和第二階段實(shí)施基本原理相同,不通點(diǎn)在于第一階段數(shù)據(jù)傳輸使用數(shù)傳模式,第二階段遙控?cái)?shù)據(jù)傳輸采用數(shù)傳和圖傳同步傳輸,原理如下:
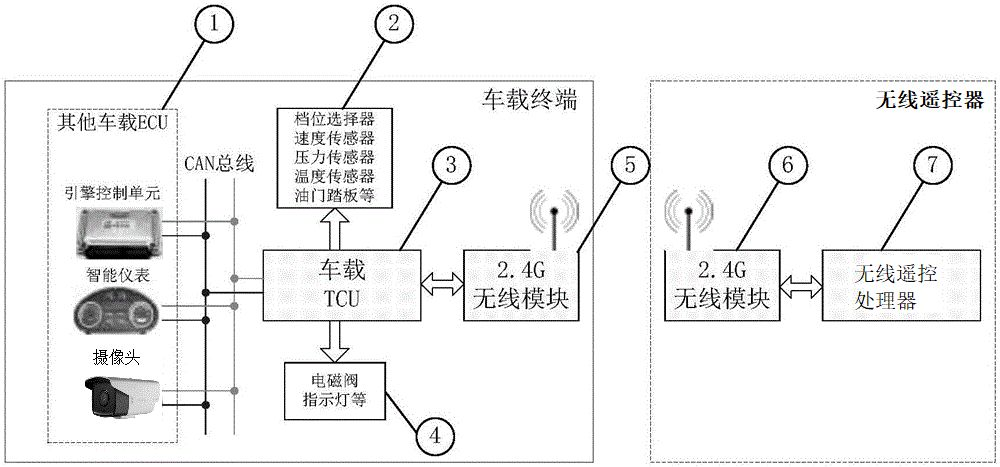
鏟運(yùn)車無線遙控系統(tǒng)分為無線收發(fā)器和遙控器兩部分,通過帶功放的2.4G點(diǎn)對點(diǎn)無線傳輸模塊進(jìn)行遠(yuǎn)程通訊,實(shí)現(xiàn)對鏟運(yùn)車現(xiàn)場數(shù)據(jù)采集及運(yùn)行動(dòng)作控制、遠(yuǎn)程實(shí)時(shí)監(jiān)控、狀態(tài)顯示、參數(shù)設(shè)置、記錄保存以及深層次后端數(shù)據(jù)處理;無線收發(fā)器通過CAN通訊讀取鏟運(yùn)車數(shù)據(jù)包括:監(jiān)測參數(shù)傳感器(2)、車載TCU(3)、功率輸出(4)、2.4G帶功放的點(diǎn)對點(diǎn)傳出模塊(5)以及發(fā)動(dòng)機(jī)ECU(1);遙控器部分包括2.4G無線接入模塊(6)、遙控器處理器(7);安裝在鏟運(yùn)車上的參數(shù)檢測傳感器(2)測取鏟運(yùn)車運(yùn)行狀態(tài)數(shù)據(jù),經(jīng)過信號調(diào)理后送至車載TCU(3),車載TCU(3)根據(jù)速度傳感器、壓力傳感器、檔位選擇器、油門踏板傳感器及發(fā)動(dòng)機(jī)控制單元傳送過來的相關(guān)數(shù)據(jù),調(diào)用相應(yīng)的自動(dòng)換檔策略,驅(qū)動(dòng)相關(guān)的換檔電磁閥及2.4G帶功放的點(diǎn)對點(diǎn)傳出模塊(5);同時(shí),通過無線收發(fā)器帶功放的2.4G點(diǎn)對點(diǎn)傳輸模塊(5)及遙控器的2.4G傳輸模塊(6),實(shí)現(xiàn)車載終端與遙控器的無線通訊。
① 第三階段采用WiFi無線網(wǎng)絡(luò)配合無線電遙控操作技術(shù)應(yīng)用于鏟運(yùn)車以實(shí)現(xiàn)遠(yuǎn)距離無線操作,也可以在遙控模式下,駕駛員在遠(yuǎn)離鏟運(yùn)車的安全區(qū)域,通過無線遙控手柄單元控制鏟運(yùn)車的各種動(dòng)作。在生產(chǎn)效率上有了很大的提高,也在很大程度上保障了駕駛員的健康及生命安全。具體原理如下:
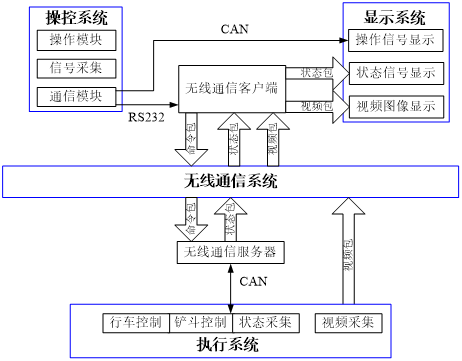
顯示系統(tǒng)框架圖
整個(gè)顯示系統(tǒng)設(shè)計(jì)遵循人機(jī)工效學(xué)的原則,采取模塊化的設(shè)計(jì)方法,整個(gè)系統(tǒng)可以分為操作數(shù)據(jù)顯示模塊、狀態(tài)數(shù)據(jù)顯示模塊以及視頻數(shù)據(jù)顯示模塊。整個(gè)系統(tǒng)框架如上圖所示。操作顯示模塊的數(shù)據(jù)來自控制器,控制器采集操作機(jī)構(gòu)的動(dòng)作之后,將其經(jīng)過處理通過CAN總線發(fā)送給液晶顯示屏,從而為操作者顯示指令信號;視頻顯示模塊包括前后鏟運(yùn)車視頻顯示,通過自帶WIFI的攝像頭拍攝鏟運(yùn)車周圍的場景,并通過無線局域網(wǎng)返回上位機(jī),在上位機(jī)解碼顯示,為操作者提供真實(shí)的駕駛操作感;狀態(tài)顯示模塊中車載終端接收各傳感器采集到的鏟運(yùn)車狀態(tài)參數(shù),然后通過自帶的WIFI將數(shù)據(jù)發(fā)送到上位機(jī),更新上位機(jī)界面的參數(shù),以便操作者了解鏟運(yùn)車的運(yùn)行狀態(tài)。
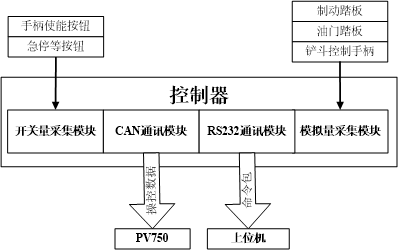
在該操控臺上搭建操控系統(tǒng)和監(jiān)控系統(tǒng)。通過操作臺上的手柄等操作機(jī)構(gòu)可以遠(yuǎn)程控制鏟運(yùn)車的行駛和動(dòng)作,操作員對操作臺上的各個(gè)旋鈕、按鈕以及手柄等進(jìn)行必要的操作,這種操作動(dòng)作經(jīng)控制器編譯后發(fā)送給上位機(jī),再通過無線網(wǎng)絡(luò)對鏟運(yùn)車的啟動(dòng)、變速、轉(zhuǎn)向、油門及剎車進(jìn)行遙控,使其按要求的速度和路線行駛,從而實(shí)現(xiàn)對鏟運(yùn)車的遠(yuǎn)程遙控和監(jiān)控。同時(shí),鏟運(yùn)車將前后路況的實(shí)時(shí)圖像和運(yùn)行參數(shù)視頻信號通過無線網(wǎng)絡(luò)實(shí)時(shí)傳輸?shù)桨惭b在操作臺上的上位機(jī)顯示屏上,使駕駛員可以實(shí)時(shí)遠(yuǎn)程掌握鏟運(yùn)車的真實(shí)駕駛環(huán)境,從而監(jiān)控鏟運(yùn)車的運(yùn)行情況,這樣,鏟運(yùn)車、遙控駕駛員以及遙控操控臺(遙控操縱平臺、無線路由、攝像機(jī)、控制系統(tǒng)等)就構(gòu)成一個(gè)閉環(huán)控制系統(tǒng)。
遠(yuǎn)程遙控系統(tǒng)特征
1) 保留之前手動(dòng)駕駛的所有功能,不改變原車的操作習(xí)慣和功能;
2) 同時(shí)具有遙控功能,可以使用遙控器進(jìn)行遠(yuǎn)距離的控制,具體可操控的基本功能如下:
a. 遙控系統(tǒng)遠(yuǎn)程操控的范圍不受距離限制;
b. 控制動(dòng)臂的升臂和降臂,同時(shí)動(dòng)作的速度可控;
c. 控制鏟斗的裝料和卸料,同時(shí)動(dòng)作的速度可控;
d. 控制斗桿油缸伸縮,同時(shí)動(dòng)作的速度可控;
e. 控制前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn),同時(shí)動(dòng)作的速度可控;
f. 控制回轉(zhuǎn),同時(shí)動(dòng)作的速度可控;
g. 控制發(fā)動(dòng)機(jī)的啟動(dòng)和停止;
h. 控制前燈和后燈的開關(guān);
i. 控制喇叭的開關(guān);
j. 有4路視頻監(jiān)控圖像,分別監(jiān)控鏟運(yùn)車的前后左右四個(gè)方向的情形。
4 結(jié) 語
通過對計(jì)算機(jī)技術(shù)、無線網(wǎng)絡(luò)與無線遙控技術(shù)的綜合應(yīng)用,從本質(zhì)上提升井下人員的出礦安全,降低勞動(dòng)強(qiáng)度,大大緩解生產(chǎn)壓力,效果顯著。同時(shí)我公司正在推進(jìn)智能化礦山建設(shè),遙控鏟運(yùn)技術(shù)是大勢所趨,現(xiàn)我公司制造的遙控鏟運(yùn)車將為公司推行遠(yuǎn)程遙控鏟運(yùn)車總結(jié)經(jīng)驗(yàn),向機(jī)械化到自動(dòng)化過渡再到智能化發(fā)展邁出重要的一步。

鄧有林 中級機(jī)械工程師
主要負(fù)責(zé)機(jī)械設(shè)備的具體研發(fā)工作,具有10年以上的設(shè)備設(shè)計(jì)及制造經(jīng)驗(yàn)。加入Alpha之前,在礦山設(shè)備領(lǐng)域,具有3年以上的選煤設(shè)備及井下礦石鏟裝運(yùn)設(shè)備的設(shè)計(jì)與研發(fā);在煤電煙氣處理環(huán)保領(lǐng)域,從事FGD吸收塔內(nèi)設(shè)備技術(shù)支持近5年,精通除霧器、脫硫噴嘴及煙氣均布器等設(shè)備的設(shè)計(jì)選型;熟悉水射流技術(shù),曾獨(dú)立設(shè)計(jì)用于軍用裝備測試的淋雨試驗(yàn)箱(GJB150.8A-2009)和用于水泥回轉(zhuǎn)窯的富氧燃燒系統(tǒng)等。

李幸福 自動(dòng)化工程師
機(jī)械工程自動(dòng)化專業(yè),擁有10多年機(jī)械電控方面經(jīng)驗(yàn)。現(xiàn)為Alpha自動(dòng)化工程師,曾參與科研院校海量發(fā)電無模成型等國家大型科研項(xiàng)目。
特別害怕萬一你需要卻找不到我們!


李生才
微信:Kyle977895349
楊博
微信:yb89yy92

有限責(zé)任公司")
技術(shù)有限公司")



有限責(zé)任公司")


如有疑問或想了解更多,請咨詢:028-83311885
-
關(guān)于我們
-
IIoT應(yīng)用案例
-
產(chǎn)品&服務(wù)
-
業(yè)務(wù)合作
- 聯(lián)系電話:15756877473 (賴經(jīng)理) 聯(lián)系電話:18282103350 (陳經(jīng)理) 聯(lián)系電話:15927439651 (王經(jīng)理) QQ交流 :1490063359 (賴經(jīng)理) QQ交流 :1184531314 (陳經(jīng)理) QQ交流 :2676439348 (王經(jīng)理) 合作郵箱:[email protected]
關(guān)注我們
-
了解行業(yè)最新資訊
 掃碼關(guān)注微信
掃碼關(guān)注微信




